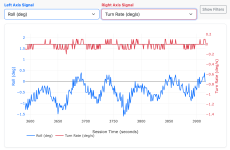
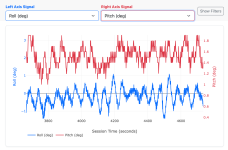
I went on a long cross country yesterday and spent most of the flight on autopilot at 8500ft MSL. I have a Dynon Skyview HDX with dual axis autopilot and I seem to be experiencing a slow oscillation in roll primarily and but it also seems to be in pitch at the same frequency. The amplitude of the roll oscillation is from about +1 to -1 deg with some variability. The pitch oscillation is from +1.8 to +1.2 deg (see the screenshot).
I flew the first leg of my trip with the default gains and sensitivities from Dynon. however on the return leg I increased the sensitivity and the roll gain to see if it would stop the slow oscillations but it did not. I did not touch any of the other settings (including cross track gains). I've confirmed my control system is tight with no slop in the controls at all. One thing to note is that I do have the spring bias electric roll trim installed, but it is set to neutral at the moment as it flies straight hands off.
My question to the hive mind is what might be the best thing to adjust and in which direction? I've read the Dynon inflight tuning guide, but i don't see any guidance on this particular error correction.
I flew the first leg of my trip with the default gains and sensitivities from Dynon. however on the return leg I increased the sensitivity and the roll gain to see if it would stop the slow oscillations but it did not. I did not touch any of the other settings (including cross track gains). I've confirmed my control system is tight with no slop in the controls at all. One thing to note is that I do have the spring bias electric roll trim installed, but it is set to neutral at the moment as it flies straight hands off.
My question to the hive mind is what might be the best thing to adjust and in which direction? I've read the Dynon inflight tuning guide, but i don't see any guidance on this particular error correction.