

N941WR
Legacy Member
Quick note, this is a new thread split off from http://www.vansairforce.com/community/showthread.php?t=112766 due to the extreme thread drift, and yet a valuable bunch of info that deserves its own thread. MJS
Two weeks ago I installed the two new Dynon control heads, which are a great addition to the SkyView!
However, there is a potential problem with the Auto Pilot that I never experienced with all the beta testing I did on the AP.
At the top of the AP control panel is a big button labeled “AP”. After I installed the control head and powered everything up I pressed that “AP” button and the controls started banging around, especially in roll.
At the time, I didn’t think much of it. However, two days later when I was preflighting, I noticed the aileron would only travel in one direction. Meaning I could have flown right turns or straight. Obviously not a good situation.
After looking in the cockpit to make sure nothing was jamming the control stick, I removed the inspection panel in the right wing, below the roll servo.
I found that the AP test function bent the attach plate and allowed the roll servo to go over center. (See pictures below.) I contacted Dynon support and was told that is why you are supposed to install the "Range of Motion Limiting Bracket". Dynon’s installation manual clearly states that they “recommend” the installation of these brackets and you can bet, as soon as I find mine, they will be installed!
My recommendations to Dynon were to fix the software so the thing won't beat the controls during the test and to redesign the attach bracket with small tabs that run along two sides to add strength and prevent the bracket from bending.
One other thing that might help is to put a large area washer between the aluminum spacer tube and the steel plate to help spread the bending load.
The roll servo arm in the "normal" position. Note the bent control attach plate.

The roll servo arm in the "reversed" position, jamming the controls.
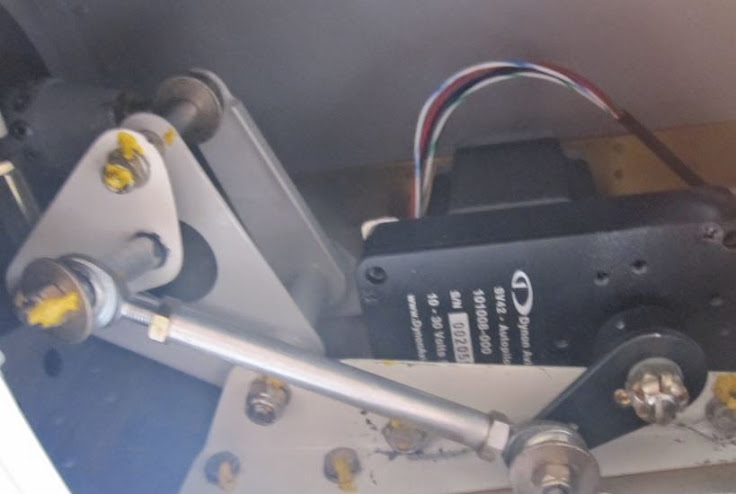
The bent control attach plate.

Two weeks ago I installed the two new Dynon control heads, which are a great addition to the SkyView!
However, there is a potential problem with the Auto Pilot that I never experienced with all the beta testing I did on the AP.
At the top of the AP control panel is a big button labeled “AP”. After I installed the control head and powered everything up I pressed that “AP” button and the controls started banging around, especially in roll.
At the time, I didn’t think much of it. However, two days later when I was preflighting, I noticed the aileron would only travel in one direction. Meaning I could have flown right turns or straight. Obviously not a good situation.
After looking in the cockpit to make sure nothing was jamming the control stick, I removed the inspection panel in the right wing, below the roll servo.
I found that the AP test function bent the attach plate and allowed the roll servo to go over center. (See pictures below.) I contacted Dynon support and was told that is why you are supposed to install the "Range of Motion Limiting Bracket". Dynon’s installation manual clearly states that they “recommend” the installation of these brackets and you can bet, as soon as I find mine, they will be installed!
My recommendations to Dynon were to fix the software so the thing won't beat the controls during the test and to redesign the attach bracket with small tabs that run along two sides to add strength and prevent the bracket from bending.
One other thing that might help is to put a large area washer between the aluminum spacer tube and the steel plate to help spread the bending load.
The roll servo arm in the "normal" position. Note the bent control attach plate.
The roll servo arm in the "reversed" position, jamming the controls.
The bent control attach plate.
Last edited by a moderator:


