We know that "energy" is the algebra of how we convert thrust into altitude and/or airspeed, and how we use a combination of pitch, roll (lift vector placement) and throttle to work the variables in that equation. For example, if we are straight and level at 5000 feet at Vmax, and we pull back smoothly on the stick, we can convert that kinetic energy (speed) into potential energy (altitude). If we keep pulling over the top (fly a loop), then we will convert the potential energy we just gained, back into kinetic energy and end up where we started.
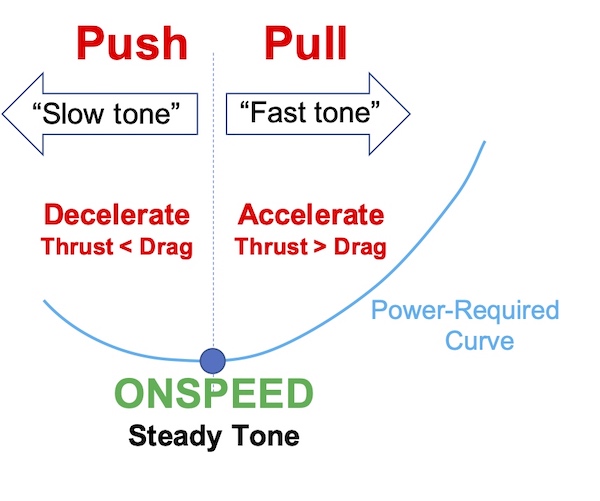
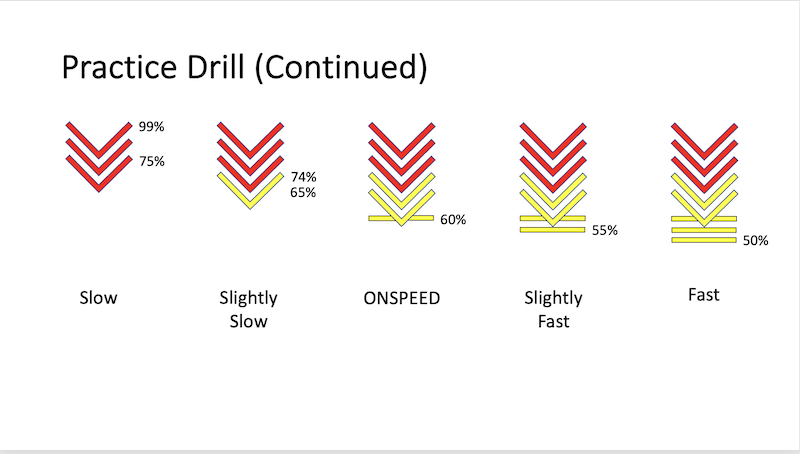
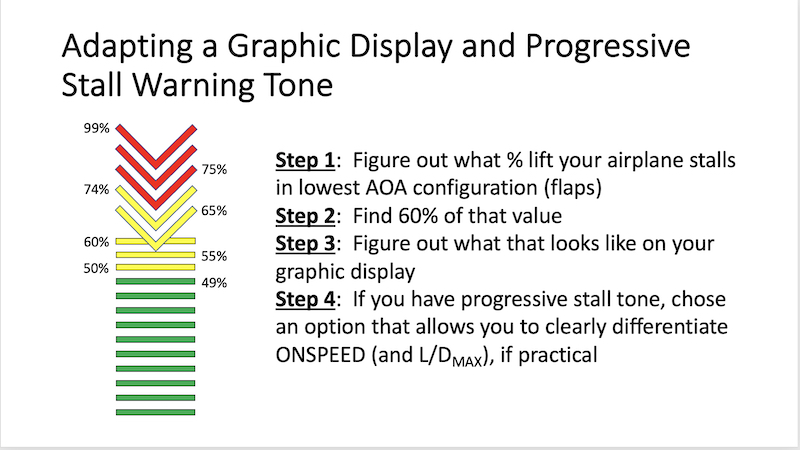
The other important energy concept is "P sub S" or "specific power." This is another trade-off problem for the pilot. If we have more thrust than drag (for a given weight), then our “p sub s” is positive: we can go up, accelerate or both. If, however, there is more drag than thrust, then “p sub s” is NEGATIVE. The airplane is going down, slowing down or both; unless the pilot does something and the ground doesn't get in the way. If thrust and drag are balanced, then "p sub s" is zero, and the airplane achieves best sustained turn performance for that power setting. The cool thing is that thrust and drag are balanced when an airplane is ONSPEED. If you can hear ONSPEED (or read it on a gauge--it's when the wing is producing 60% of it's total lift capacity) and ascertain whether you are fast or slow relative to that angle of attack, you have instant SA about your energy state.
A loop is a vertical turn. If we want to optimize sustained turn performance (best turn rate and turn radius over time), we turn ONSPEED. I had to do some test video editing, and thought this short clip might illustrate the paragraphs above with "a picture that's worth a thousand words" that is only 16 seconds long:
https://youtu.be/X5NzOUNJavA
You don’t have to fly aerobatics to want optimum turn performance…the same physics apply when you turn base to final or any time you maneuver the airplane.
Fly Safe,
Vac
FlyONSPEED.org
P.S. "MIL power" = wide open throttle
The other important energy concept is "P sub S" or "specific power." This is another trade-off problem for the pilot. If we have more thrust than drag (for a given weight), then our “p sub s” is positive: we can go up, accelerate or both. If, however, there is more drag than thrust, then “p sub s” is NEGATIVE. The airplane is going down, slowing down or both; unless the pilot does something and the ground doesn't get in the way. If thrust and drag are balanced, then "p sub s" is zero, and the airplane achieves best sustained turn performance for that power setting. The cool thing is that thrust and drag are balanced when an airplane is ONSPEED. If you can hear ONSPEED (or read it on a gauge--it's when the wing is producing 60% of it's total lift capacity) and ascertain whether you are fast or slow relative to that angle of attack, you have instant SA about your energy state.
A loop is a vertical turn. If we want to optimize sustained turn performance (best turn rate and turn radius over time), we turn ONSPEED. I had to do some test video editing, and thought this short clip might illustrate the paragraphs above with "a picture that's worth a thousand words" that is only 16 seconds long:
https://youtu.be/X5NzOUNJavA
You don’t have to fly aerobatics to want optimum turn performance…the same physics apply when you turn base to final or any time you maneuver the airplane.
Fly Safe,
Vac
FlyONSPEED.org
P.S. "MIL power" = wide open throttle
Last edited:
")
")