
Van's Air Force
You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
GRT Autopilot
- Thread starter celstar
- Start date

Radomir
Well Known Member
I flew it in a Glasair quite a bit and its performance exceeded all my expectations. It works very well. Some of the gains may need slight adjustment, but that really applies to just about any airplane and any system.
However, standalone vs. integrated autopilot is a decision that can take more than just performance into account. It's kinda difficult to pick one.. whatever meets your criteria.. I used to have an external (TruTrak) in my RV and it worked great too.. never had an EFIS failure so really didn't have any one strong argument in favor of one system.
However, standalone vs. integrated autopilot is a decision that can take more than just performance into account. It's kinda difficult to pick one.. whatever meets your criteria.. I used to have an external (TruTrak) in my RV and it worked great too.. never had an EFIS failure so really didn't have any one strong argument in favor of one system.
George in Langley BC
Well Known Member
GRT Autopilot Report
Replaced my Trutrak ADI 2 autopilot with GRT Autopilot in my 7A this past winter.
My system uses two GRT Sport's, both with AHRS and one with Vertical module and a external Airinc 429 module. System is wired so that either Sport can drive autopilot. With the limited amount of input/output ports on the Sport my system is really maxed out.
The Good: Using SL-30 it is amazing to watch it capture the localizer, turn inbound, then capture the glideslope and arm the MISSED approach button, then fly a great ILS approach and fly a missed approach (initially runway hdg & 500 fpm climb). I just need to manage the power.
Even neater to watch the GRT use the Garmin 420 to capture and fly a VNAV approach or enter a holding pattern.
I use speed (default) to climb to a selected altitude and A/P maintains speed within 3-4 kt. use rate of descent for descents and A/P stays within 50 fpm. of selected descent rate. Altitudes are maintained + - 30 feet and heading select + - 3 degrees. Altitude captures are good with virtually no overshoot.
EFIS shows when pitch trim is required and A/P will handle speed changes of about 30-40 kt without disconnect. A/P has Min/Max airspeed protection. I have minimum speed set at 80 kt and (in alt hold) with a deliberate speed reduction A/P will start a descent at about 84 kt. I have not tested max speed protection, currently set at 175 kt IAS.
All above parameters in smooth air but A/P handles turbulence well, very similar to or better than my Tru Trak. .
The Bad: There are a lot of settings for the autopilot under two EFIS menu's and it takes a lot of flying hours to get everything adjusted properly.
The Ugly: A friend recently said my GRT autopilot does more than his company's King Air autopilot however he will not upgrade his Trio because of the complexity in operating the GRT using the EFIS menu system.
It is time consuming to learn to use the GRT autopilot, at least in my configuration. A simple external A/P control module would be great accessory and GRT has at least thought about that.
My evaluation:
My system is set up for IFR and is very capable but complex, my comments on operation may not apply to simpler VFR installations.
Price 10/10
Performance 10/10
Ease to retrofit into TruTrack brackets 10/10 (uses less wires)
Ease of setup 6/10
Ease of operation 5/10 (my configuration)
Replaced my Trutrak ADI 2 autopilot with GRT Autopilot in my 7A this past winter.
My system uses two GRT Sport's, both with AHRS and one with Vertical module and a external Airinc 429 module. System is wired so that either Sport can drive autopilot. With the limited amount of input/output ports on the Sport my system is really maxed out.
The Good: Using SL-30 it is amazing to watch it capture the localizer, turn inbound, then capture the glideslope and arm the MISSED approach button, then fly a great ILS approach and fly a missed approach (initially runway hdg & 500 fpm climb). I just need to manage the power.
Even neater to watch the GRT use the Garmin 420 to capture and fly a VNAV approach or enter a holding pattern.
I use speed (default) to climb to a selected altitude and A/P maintains speed within 3-4 kt. use rate of descent for descents and A/P stays within 50 fpm. of selected descent rate. Altitudes are maintained + - 30 feet and heading select + - 3 degrees. Altitude captures are good with virtually no overshoot.
EFIS shows when pitch trim is required and A/P will handle speed changes of about 30-40 kt without disconnect. A/P has Min/Max airspeed protection. I have minimum speed set at 80 kt and (in alt hold) with a deliberate speed reduction A/P will start a descent at about 84 kt. I have not tested max speed protection, currently set at 175 kt IAS.
All above parameters in smooth air but A/P handles turbulence well, very similar to or better than my Tru Trak. .
The Bad: There are a lot of settings for the autopilot under two EFIS menu's and it takes a lot of flying hours to get everything adjusted properly.
The Ugly: A friend recently said my GRT autopilot does more than his company's King Air autopilot however he will not upgrade his Trio because of the complexity in operating the GRT using the EFIS menu system.
It is time consuming to learn to use the GRT autopilot, at least in my configuration. A simple external A/P control module would be great accessory and GRT has at least thought about that.
My evaluation:
My system is set up for IFR and is very capable but complex, my comments on operation may not apply to simpler VFR installations.
Price 10/10
Performance 10/10
Ease to retrofit into TruTrack brackets 10/10 (uses less wires)
Ease of setup 6/10
Ease of operation 5/10 (my configuration)
celstar
Well Known Member
Not working right
O.k, have the GRT auto pilot installed by Avionocs shop and did all of the Pre flight programing listed. Went up to do the in flight stuff and can't seem to get it to work correctly. The plane seems to always want to go into a turn when ever it is engaged, does not matter if I'm on gps 1 or gps 2 push nav or hdg does not matter. Tried putting my servo gains up or down and was able to have the plane hold it once all be it not real steady but thought ok right direction? Changed gains some to help and no luck, off in a turn again?
My questions now is what baud rate are others using and also what are your gain settings? Also open to other suggestions on were to look.
One other notice was when I was holding the stick lightly during auto pilot use and I could feel the click click like you get when there is not enough torque or when you hold the stick when the auto pilot is trying to go. All of my torque settings are at 15 the highest they can go. When I landed I was able to get the stick to go all the way to the right with the auto pilot but the auto pilot could not go all the way to the left with out me helping it it would just click click and try to but could not. It does say in the manual that in some planes that on the ground this can happen but should not be a problem in the air. Any one else have this with a working auto pilot?
O.k, have the GRT auto pilot installed by Avionocs shop and did all of the Pre flight programing listed. Went up to do the in flight stuff and can't seem to get it to work correctly. The plane seems to always want to go into a turn when ever it is engaged, does not matter if I'm on gps 1 or gps 2 push nav or hdg does not matter. Tried putting my servo gains up or down and was able to have the plane hold it once all be it not real steady but thought ok right direction? Changed gains some to help and no luck, off in a turn again?
My questions now is what baud rate are others using and also what are your gain settings? Also open to other suggestions on were to look.
One other notice was when I was holding the stick lightly during auto pilot use and I could feel the click click like you get when there is not enough torque or when you hold the stick when the auto pilot is trying to go. All of my torque settings are at 15 the highest they can go. When I landed I was able to get the stick to go all the way to the right with the auto pilot but the auto pilot could not go all the way to the left with out me helping it it would just click click and try to but could not. It does say in the manual that in some planes that on the ground this can happen but should not be a problem in the air. Any one else have this with a working auto pilot?
Last edited:
Sid Lambert
Well Known Member
Mine pushes all the way to the right and left on the ground. It tracks heading and GPS extremely well. You have any photos of the roll servo installation? I don't trust many avionics shops with experimentals unless you say "Stein" or "Starks" or any of the others well know shops I would question their work first.
celstar
Well Known Member
You should be able to drive the ailerons stop to stop on the ground using heading mode, if not you have servo torque/wiring/install problem.
Walt, have you seen any install issues and if you have what were they? Also how would the wiring effect stop to stop performance?
Walt
Well Known Member
Forget the below... I was thinking TT/GRT
When all else fails...
From the TT manuals:
The roll servo should also be responding at this time, moving the controls in such a way as to turn the aircraft from the current heading (shown as a 3-digit number after the word HDG in the upper-left of the display) to the selected heading (shown as a 3-digit number after the word SEL in the lower left of the display). The initial value of the selected heading is the current heading of the aircraft at the moment of engagement, but the knob can be used to modify the selected heading. When the heading shown as SEL agrees with the heading of the aircraft shown in the top line as HDG, the roll servo should stop or run only very slowly. If the knob is rotated clockwise, to a selected heading right of the current heading, the control yoke or stick should move in such a way as to roll the aircraft to the right. Conversely, a selected heading to the left of the current heading will move the controls in the opposite direction to attempt a roll towards the left. If servo direction is not correct, the wires going to pins 4 and 5 of the roll servo (pins 20 and 21 on the main connector) must be reversed to achieve the correct response. If a servo does not move at all, double-check the LAT TORQUE or VRT TORQUE setting as appropriate. If a servo jitters but does not actually rotate, check the wiring on the four servo drive lines to that servo for continuity and correctness. If the servo does not seem to have any torque, check the relevant torque control line for continuity and correctness.
When all else fails...
From the TT manuals:
The roll servo should also be responding at this time, moving the controls in such a way as to turn the aircraft from the current heading (shown as a 3-digit number after the word HDG in the upper-left of the display) to the selected heading (shown as a 3-digit number after the word SEL in the lower left of the display). The initial value of the selected heading is the current heading of the aircraft at the moment of engagement, but the knob can be used to modify the selected heading. When the heading shown as SEL agrees with the heading of the aircraft shown in the top line as HDG, the roll servo should stop or run only very slowly. If the knob is rotated clockwise, to a selected heading right of the current heading, the control yoke or stick should move in such a way as to roll the aircraft to the right. Conversely, a selected heading to the left of the current heading will move the controls in the opposite direction to attempt a roll towards the left. If servo direction is not correct, the wires going to pins 4 and 5 of the roll servo (pins 20 and 21 on the main connector) must be reversed to achieve the correct response. If a servo does not move at all, double-check the LAT TORQUE or VRT TORQUE setting as appropriate. If a servo jitters but does not actually rotate, check the wiring on the four servo drive lines to that servo for continuity and correctness. If the servo does not seem to have any torque, check the relevant torque control line for continuity and correctness.
Last edited:
Sid Lambert
Well Known Member
The GRT is not the TT. It has no reversal of wires or torque control line.
Celstar, did you perform the "Post install checklist" document from GRT? When you do a "Roll Direction" test does it go to the stop and then when you reverse the direction by pressing "Reverse" on the EFIS does it go to the stop in the other direction?
If it's configured correctly then it must be the geometry of the control rod to servo or servo location.
Celstar, did you perform the "Post install checklist" document from GRT? When you do a "Roll Direction" test does it go to the stop and then when you reverse the direction by pressing "Reverse" on the EFIS does it go to the stop in the other direction?
If it's configured correctly then it must be the geometry of the control rod to servo or servo location.
vfrazier
Well Known Member
A post above mentioned that there are many settings to input. It would be great if one, or two, or more successful installers would post their settings in this thread.
I've got all of my settings from my Horizon I written down and have shared them many times. I can't help but think that it has saved others quite a bit of time by having a starting point.
Yes, I do understand that there will be differences between installations, but a starting point sure helps.
I've got all of my settings from my Horizon I written down and have shared them many times. I can't help but think that it has saved others quite a bit of time by having a starting point.
Yes, I do understand that there will be differences between installations, but a starting point sure helps.
Sid Lambert
Well Known Member
Whole heartedly agree but I'm still tweaking mine.
I do have the roll torque at 15 and the pitch at 11. I increased my altitude gain to 120% and decreased my heading to 80%. I haven't been flying the AP but about 2 weeks so I'm still figuring.
I do have the roll torque at 15 and the pitch at 11. I increased my altitude gain to 120% and decreased my heading to 80%. I haven't been flying the AP but about 2 weeks so I'm still figuring.
A post above mentioned that there are many settings to input. It would be great if one, or two, or more successful installers would post their settings in this thread.
I've got all of my settings from my Horizon I written down and have shared them many times. I can't help but think that it has saved others quite a bit of time by having a starting point.
Yes, I do understand that there will be differences between installations, but a starting point sure helps.
celstar
Well Known Member
Good information
Good to know what is getting you close.
Thank you.
Whole heartedly agree but I'm still tweaking mine.
I do have the roll torque at 15 and the pitch at 11. I increased my altitude gain to 120% and decreased my heading to 80%. I haven't been flying the AP but about 2 weeks so I'm still figuring.
Good to know what is getting you close.
Thank you.
celstar
Well Known Member
I agree
I can't agree more, anyone out there with a GRT autopilot that can give all of there settings?
A post above mentioned that there are many settings to input. It would be great if one, or two, or more successful installers would post their settings in this thread.
I've got all of my settings from my Horizon I written down and have shared them many times. I can't help but think that it has saved others quite a bit of time by having a starting point.
Yes, I do understand that there will be differences between installations, but a starting point sure helps.
I can't agree more, anyone out there with a GRT autopilot that can give all of there settings?
celstar
Well Known Member
Yes but.
Yes it does but when it try's to go all the way to the left it will start to skip half way to the left stop. If I help it of course it will go all the way.
The GRT is not the TT. It has no reversal of wires or torque control line.
Celstar, did you perform the "Post install checklist" document from GRT? When you do a "Roll Direction" test does it go to the stop and then when you reverse the direction by pressing "Reverse" on the EFIS does it go to the stop in the other direction?
If it's configured correctly then it must be the geometry of the control rod to servo or servo location.
Yes it does but when it try's to go all the way to the left it will start to skip half way to the left stop. If I help it of course it will go all the way.
celstar
Well Known Member
Found the problem
O.k, went through the parameters that the avionics shop put in today and found that they had the roll servo on reverse instead of forward. Whent up and flew and wallah with a few more little changes to the gains it works like a charm.
Thanks everyone who posted.
O.k, went through the parameters that the avionics shop put in today and found that they had the roll servo on reverse instead of forward. Whent up and flew and wallah with a few more little changes to the gains it works like a charm.
Thanks everyone who posted.
George in Langley BC
Well Known Member
GRT Autopilot Servo Problem
Celstar, glad your install problem is solved.
Since my post in August evaluating the GRT autopilot I have had a puzzling roll servo problem. The roll mode gradually became very sluggish and occasionally the aircraft drifted off it's assigned heading and/or course.
I performed the "Post install checklist" recently and found on the "Roll & Pitch Direction" tests that the pitch servo applies about five pounds pressure (at top of stick) with pitch torque set at 11 however the roll servo would only apply about one half pound pressure with roll torque set full up at 15.
Pulled the roll servo out and I can hear what I believe is a set screw rattling around inside the gear box. I am guessing that the plastic drive gear is pressed onto the output shaft and it applies some pressure to flight controls but with resistance and a missing set screw (or locking device) it slips and allows aircraft to wander off course.
Lesson learned, with a problem re-follow install/checkout instructions.
Servo now on way to GRT for repair and I still think GRT has a great autopilot system.
Celstar, glad your install problem is solved.
Since my post in August evaluating the GRT autopilot I have had a puzzling roll servo problem. The roll mode gradually became very sluggish and occasionally the aircraft drifted off it's assigned heading and/or course.
I performed the "Post install checklist" recently and found on the "Roll & Pitch Direction" tests that the pitch servo applies about five pounds pressure (at top of stick) with pitch torque set at 11 however the roll servo would only apply about one half pound pressure with roll torque set full up at 15.
Pulled the roll servo out and I can hear what I believe is a set screw rattling around inside the gear box. I am guessing that the plastic drive gear is pressed onto the output shaft and it applies some pressure to flight controls but with resistance and a missing set screw (or locking device) it slips and allows aircraft to wander off course.
Lesson learned, with a problem re-follow install/checkout instructions.
Servo now on way to GRT for repair and I still think GRT has a great autopilot system.
RV6airplanePilot
Well Known Member
Videos of GRT autopilot on approach
in a RV6a with GRT HX EFIS. My settings were all standard. I tried the Enhanced Profile, but that required more fine tuning for me which were OK. But now I have gone back to the standard Profile. The SAP is working very well as are all other operations.
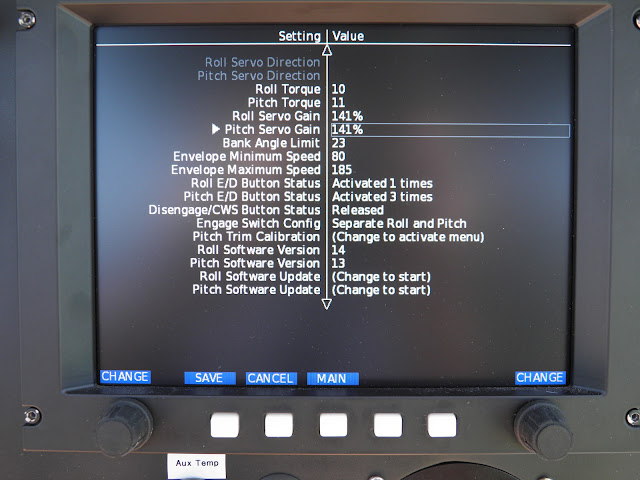
Roll Torque is 10, Pitch Torque is 11, both Roll & Pitch Servo Gains are now set to 141%. That gives me a little smoother action than 100% (which was only slightly different in results). When I increased the roll gain to 141 I noticed the corrections in smooth air were smaller and more frequent. My experience was that above a certain gain level it became jumpy. At too low of gain the corrections were too far apart and too big. Conclusion: the GRT AP is very good and easy to work with.
http://youtu.be/bjEz_Fwe53k
http://youtu.be/8EB0GX59Qus
Dale
RV6a
Superior IO 360, Hartzell Blended Air Foil, GRT HX EFIS & AP
Purchased flying from builder Jerry Cochran
in a RV6a with GRT HX EFIS. My settings were all standard. I tried the Enhanced Profile, but that required more fine tuning for me which were OK. But now I have gone back to the standard Profile. The SAP is working very well as are all other operations.
Roll Torque is 10, Pitch Torque is 11, both Roll & Pitch Servo Gains are now set to 141%. That gives me a little smoother action than 100% (which was only slightly different in results). When I increased the roll gain to 141 I noticed the corrections in smooth air were smaller and more frequent. My experience was that above a certain gain level it became jumpy. At too low of gain the corrections were too far apart and too big. Conclusion: the GRT AP is very good and easy to work with.
http://youtu.be/bjEz_Fwe53k
http://youtu.be/8EB0GX59Qus
Dale
RV6a
Superior IO 360, Hartzell Blended Air Foil, GRT HX EFIS & AP
Purchased flying from builder Jerry Cochran
Last edited:
RV6airplanePilot
Well Known Member
GRT Autopilot settings here
a photo of settings in RV6a:
Dale
4 months with HX and GRT autopilot
videos in operation in above post
a photo of settings in RV6a:
Dale
4 months with HX and GRT autopilot
videos in operation in above post
Calibration and testing
Thanks to your hints I calibrated my autopilot yesterday, and it worked very well. The bad part is that it reminded me what a bad pilot I am! It really holds a heading and altitude very well - much better than I could even if I gave it 100% of my concentration - which is kind of hard during flight testing in a relatively "busy" area.
I'm sure I'll do a bit more fiddling with the settings over the coming flights, but I'm really impressed with it so far.
Thanks to your hints I calibrated my autopilot yesterday, and it worked very well. The bad part is that it reminded me what a bad pilot I am! It really holds a heading and altitude very well - much better than I could even if I gave it 100% of my concentration - which is kind of hard during flight testing in a relatively "busy" area.
I'm sure I'll do a bit more fiddling with the settings over the coming flights, but I'm really impressed with it so far.

